
 FINALIST
FINALIST
Tangible Formations


Category : STUDENT
By Kyriaki Goti and Shir Katz (Germany)
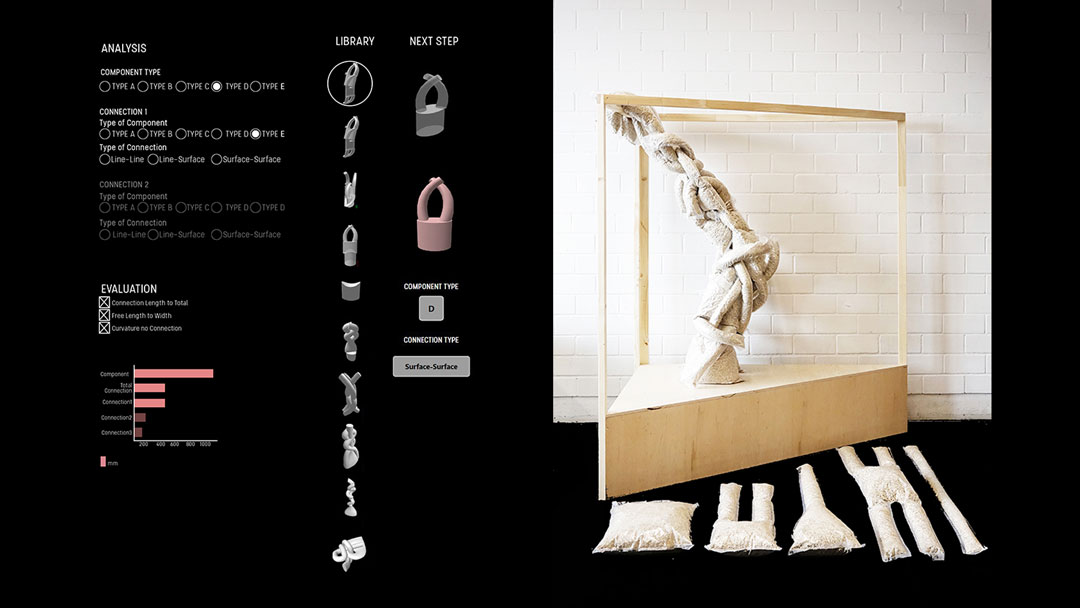
This project examines the potential of using tangible interfaces and sensor feedback to develop an intuitive haptic design and construction process utilizing granular jamming. By taking advantage of the variable stiffness of granular jamming, we created an adaptive fabrication process, where the user can easily and quickly create various formations by touching and forming individual jammed units which can weave or interlock in an overall system.
Throughout the process, a tangible interface guides the user’s design decisions and operations, based on predesigned formal and tectonic strategies from a background computational process and library. By recording and storing the formations that multiple users produce with their own hands, this background computational library expands and learns from the successes and failures of previous iterations, ultimately developing a robust and open-ended design and construction strategy for granular jamming.
Today, there is a big focus on computational material simulation in architecture and engineering, as there has been an effort to understand how to design and fabricate with complex material systems. This has led to a neglect of the human abilities to intuitively interact and understand complex material behaviors. We believe that humans can develop fast intuition with materials that are new to them, just by touching them. By recording every design iteration produced by the tangible interaction between human and material and storing them in a computational library, we can collect all the data that is needed in order to create a generative design tool. This tool can develop a basic understanding of a complex material system that is hard to simulate or calculate, just by recording the outcome that derives from the empirical knowledge that the users have. This material and software integration allows a two way learning process – from the user to the computer and vice versa-, and leads to a highly adaptable, open ended, construction system with efficient material usage, high variability of forms and easy fabrication. Finally, we believe that such a system could lead to crowd-sourcing and democratization in design processes, where users from different backgrounds – that are not architects or engineers can contribute design iterations and let our computational tool evaluate it and learn from it.
In our system, we use malleable components that are made out of polypropylene vacuum membranes and wood shavings. In order to fabricate them, we used CNC cutting plotter for cutting the membranes in the desired shape and a constant heat roller sealer for sealing the membrane. We then filled the membranes with wood shavings. In order to make our components stiff and able to maintain their shape after being formed by the users, we apply vacuum pressure into the membrane with the use of a vacuum pump. Each formed component is surveyed using a HTC VIVE Controller. This survey helps us generate digitally the geometry of the formed components that will be stored in the computational
library. VIVE hand tracking is preferred because it is a very intuitive method that can be easily operated for recording complex forms. This makes an easy transition from the physical to the digital environment. In order to generate the formed geometry, we used Grasshopper, more specifically the plug-in Kangaroo 2 and Shape Matching Goals. For the visualization of our interface we used the Grasshopper plug-in Human UI. For the creation of our computational library we use the plug-in GHPython.
MEMBER
- Supervisor
- Prof. Achim Menges
- Supervisor
- Prof.Jan Knippers
- Tutor
- Ehsan Baharlou
- Tutor
- Lauren Vasey



JUDGES, COMMENTS
-
Julia Cassim
Professor at KYOTO Design Lab Kyoto Institute of TechnologyThoroughly-realised generative design toolkit which allows intuitive physical manipulation of forms in the material world and simultaneously digital visualisation. The ability to record, archive and playback allows an iterative understanding of failure and success which is crucial to building confidence in how to take the next steps.