
 SPECIAL PRIZE
SPECIAL PRIZE
Stand
Category : GENERAL
By 前川和純 (日本)
前川和純
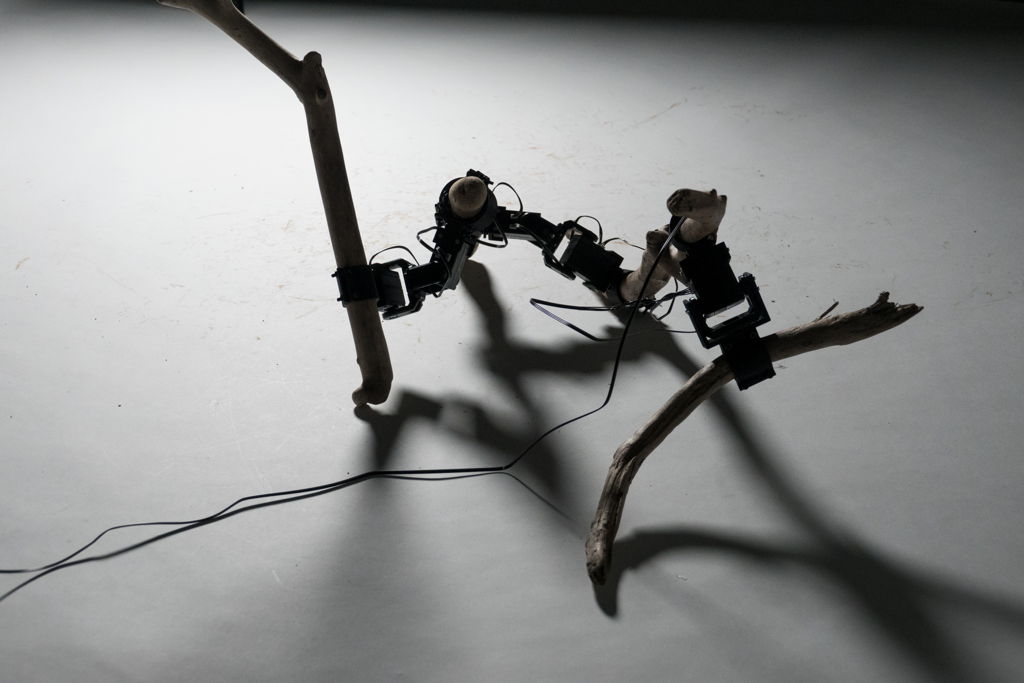
ロボットのハードウェア設計は、通常その目的を反映します。例を挙げると、歩くための脚や、伸ばすための腕、握るための手などがあります。機械システムの機能は、設計者により明示的に定義され、直線や円弧で構成されるシンプルな形状は明確な機能にとって妥当です。
一方では、私たちの実環境は多様な形に満ちています。様々な要因や、生物学的成長、老化、風化等により複雑な形状が形成されています。多様なオブジェクトを利用しロボットを作ることで、今まで見たことのないような動作や動きを見ることができるのかもしれません。単純な形状では恐らく発見できないような予測不可能な動きを見つけ出すことを目指しています。
この作業では、ロボットの基本機能として、立ち上がる動作に焦点を当てます。ロボットをブリコラージュするための素材は、多様な形状のオブジェクトとして木の枝を選択します。ロボットのポーズは、体の高さを最大化することを目的とし生成されます。様々な体型のロボットは、リアルタイムで試行錯誤を繰り返すことで姿勢を変えていきます。ラーニングプロセスを通して、この作品は、ありきたりなオブジェクトに与えられた新たな機能と意味を描写しています。
通常ロボットコンポーネントとして適用されない多様な一般的オブジェクトを用いてロボットを制作することで、新たな機能やオブジェクトに与えられる新たな意味を探求します。ロボットの理想の方法を再考することに加え、私たちはロボットのステレオタイプを覆し、さらにコンセプトを拡大し拡張することを目指しています。
ソフトウェア
ロボットはターゲットの動きに応じてモーションを更新します。その上に設置された深度センサーは、地面からのロボットのボリュームの中心(CoV)の高さを測定しています。このロボットの目的はこのCoVの高さを最大にすることです。この基準に基づき、最適化されたモーションをスタンディングとして定義したのです。ロボットは姿勢を変え、リアルタイムで試行錯誤し、各モーターの入力値を更新します。進化的アルゴリズムの1つであるCMA‒ESは、ロボットのポーズの生成及び最適化のために利用します。最適化プロセスを通じて、多様な形状のツリーの枝に与えられる新たな機能と意味を発見していきます。
ハードウェア
ロボット本体として機能させるために、多様な形状の枝が集められ、サーボモーターに接続されロボットが製作されます。枝とサーボモーターは、3Dプリンターで印刷されたコネクターで接続されます。DoFがそれぞれ異なる複数のロボットを設計しました。


JUDGES, COMMENTS
-
福田 敏也
博報堂フェロー/Chief Creative x Technology Officer 大阪芸術大学デザイン学科教授 株式会社トリプルセブン・クリエイティブストラテジーズ代表取締役 FabCafe 共同設立者自分たちは、自分たちのこころの内側にある「立つ」の既成概念に縛られる。無意識のうちに。自分を縛る既成概念にからめとられて、狭い範囲の思考を繰り返してしまう。「Stand/立つ」とは何なのか?本当に新しいものをつくりたいなら、その意味の本質と向きあわなきゃいけない。既成概念の壁をぶち壊して自由にならなきゃいけない。こうした作品の作者から、将来、どんなイノベーションが生まれてくるのか、大いに期待される。