
 SPECIAL PRIZE
SPECIAL PRIZE
Stand
Category : GENERAL
By Azumi Maekawa (Japan)
Azumi Maekawa
Azumi Maekawa is a Ph.D. student at the University of Tokyo, in Information Somatics Lab. His research interests are in the areas of Robotics, Machine Learning, Design, Digital Fabrication, and Human Robot Interaction. The focus of his current work is the motion with the physical bodies
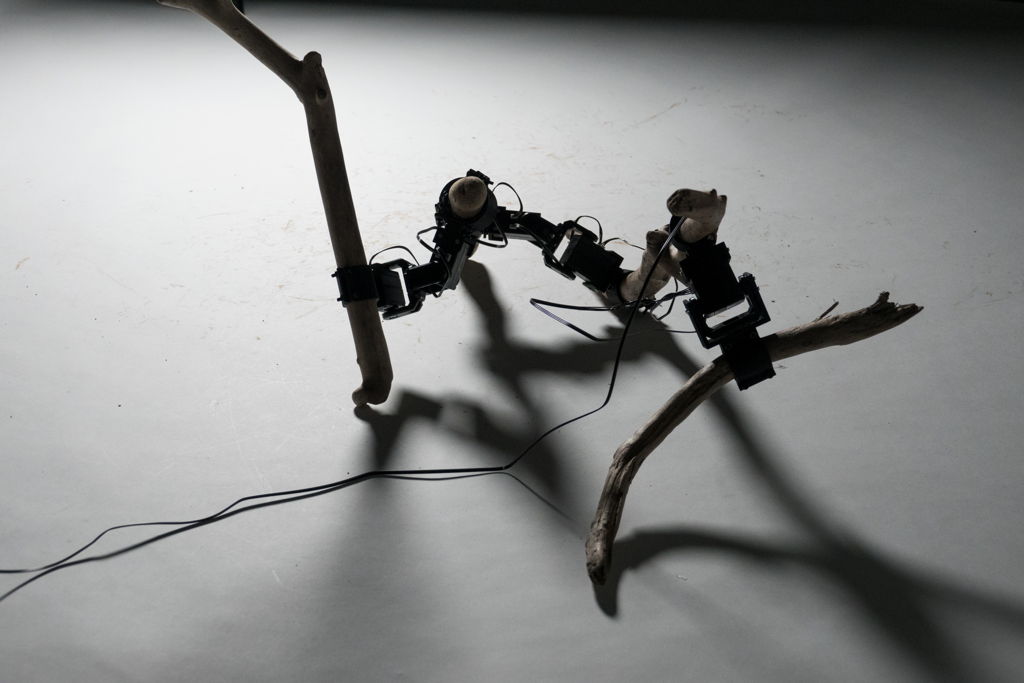
The hardware design of the robots usually reflects its purpose. For example, leg for walking, arm for reaching, hand for grasping, etc. The function of mechanical systems is explicitly defined by designers and the simple shape consisting of straight lines or circular arcs is reasonable for its clarified function. On the other hand, our real environment is full of diverse shapes. The complex shape has been formed by various factors, biological growth, aging, weathering and so on. Utilizing diverse objects to create robots, we might be able to see behaviors and motions we’ve never seen. We aim to find unpredictable motions we could not discover with simple shapes. In this work, as a primitive function of the robot, we focus on stand-up behavior. For the materials that bricolage the robot, we select tree branches as objects with diverse shapes. The robots’ poses are generated aiming to maximize the height of the bodies. Robots with diverse body shapes change their pose by repeating trial and error in real time. Through the process of learning, this work portrays new functions and meanings given to commonplace objects.
To explore new meanings given to new functions and objects by creating robots using various common objects that are not normally applied as robot components. In addition to rethinking the ideal way of robots, we aim to overthrow stereotypes of robots and to expand and extend the concept.
Software The robot updates its motion according to the target behavior. A depth sensor installed above it is measuring the height of the robot’s Center of Volume (CoV) from the ground. The purpose of the robot is to maximize the height of this CoV. We defined the optimized motion based on this criterion as standing. The robot changes its pose and updates input values to each motor through trial and error in real time. CMA‒ES, which is one of the evolutionary algorithms, is used for the generation of robot’s poses and optimization. Through the process of optimization, we discover new functions and meanings given to branches of trees with various shapes. Hardware Various shape branches are collected to serve as the robot body and connected to servo motors to create the robot. The branches and servo motors are connected by connectors printed by a 3D printer. We designed several robots with different DoF in each.


JUDGES, COMMENTS
-
Toshiya Fukuda
Hakuhodo Fellow / Chief Creative x Technology Officer Osaka University of the Arts Professor of Design Triple Seven Creative Strategies Co., Ltd. Representative Director Co-Founder of FabCafeWe unconsciously are bound by the preconceived notions of what "standing" means inside our hearts. Entwined with the preconceived notions that bind us, we repeat narrow ranges of thinking. What is it to stand? If you want to make something new, you must face the true nature of that meaning. You must destroy the wall of preconceived notions and become free. I greatly anticipate what kinds of innovations will be born from authors with such works in the future.